

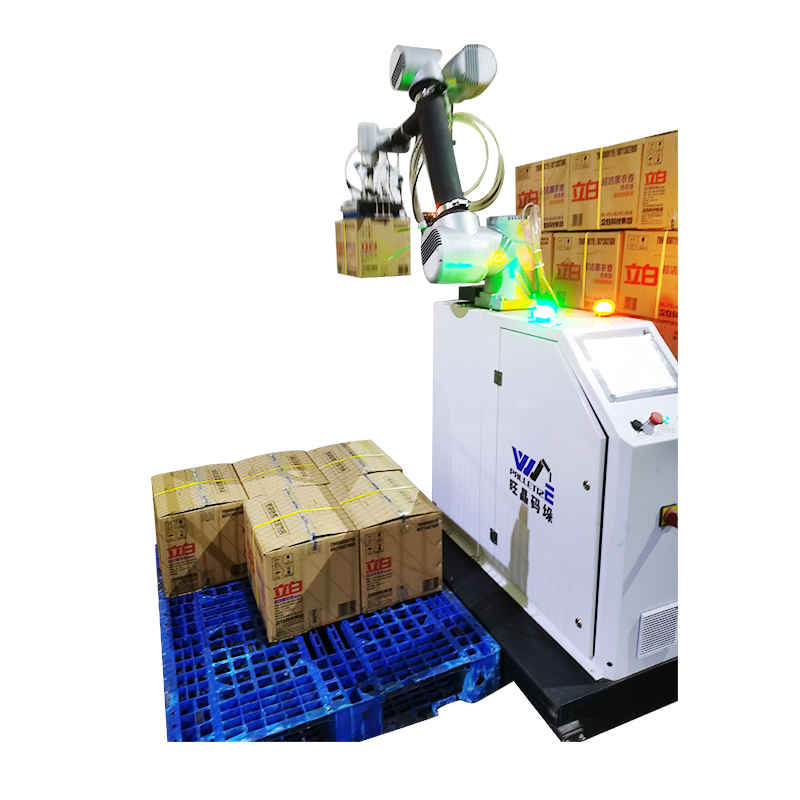
提升作业效率,堆垛机助力仓储物流
随着物流业的快速发展,仓储物流作业效率的提升成为了企业竞争力的重要组成部分。作为现代仓储物流设备中的重要一员,堆垛机极大地提升了仓储物流的效率和精准度,使得企业能够更好地应对市场的挑战,降低成本,提升服务质量。
市场前瞻 2025-04-03

提升效率:自动堆垛机的应用与优势
随着工业化生产的深入发展和物流行业的不断壮大,自动化设备成为提高生产效率和降低人力成本的重要工具。在这其中,堆垛机作为一种自动化的提升设备,扮演着举足轻重的角色。
市场前瞻 2025-04-02

提升效率!自动堆垛机助力仓储作业
随着工业自动化技术的不断发展,自动堆垛机作为现代仓储作业的重要设备,正逐渐成为仓储行业的焦点。自动堆垛机以其高效的堆垛能力、精准的定位和省时省力的特点,极大地提高了仓储作业的效率,并改善了仓储环境的安全性和稳定性。
市场前瞻 2025-04-01
提升效率!自动堆垛机实现仓储智能化
在现代物流行业中,提高仓储效率和减少人力成本是企业追求的重要目标。随着技术的不断发展,自动堆垛机作为一种高效、智能的仓储装备,正在逐渐成为企业的首选。重点讨论堆垛机的作用、特点以及对仓储智能化的推动作用,以及如何充分利用它来提升仓储效率。
市场前瞻 2025-03-31

提升效率!一种现代堆垛机
在现代物流和制造业中,提高效率和减少人力成本是关键挑战之一。堆垛机作为一种高效的自动化设备,在仓储和物流领域扮演着重要角色。
市场前瞻 2025-03-28

提升效率!全新堆垛机带来的革新技术
市场前瞻 2025-03-27

堆垛机:提升物流效率的自动堆垛机
随着物流行业的快速发展,高效的物流运作已经成为企业提高竞争力的重要因素之一。而在现代物流系统中,堆垛机作为一种自动化设备,能够高效地完成货物的堆垛和存储,极大地提升了物流效率。
市场前瞻 2025-03-26

智能堆垛机的作用与技术优势
随着物流行业的快速发展和技术的不断进步,越来越多的企业开始关注提升物流效率。而智能堆垛机作为一种高效、智能化的物流设备,正得到越来越多企业的重视和应用。
市场前瞻 2025-03-25
