

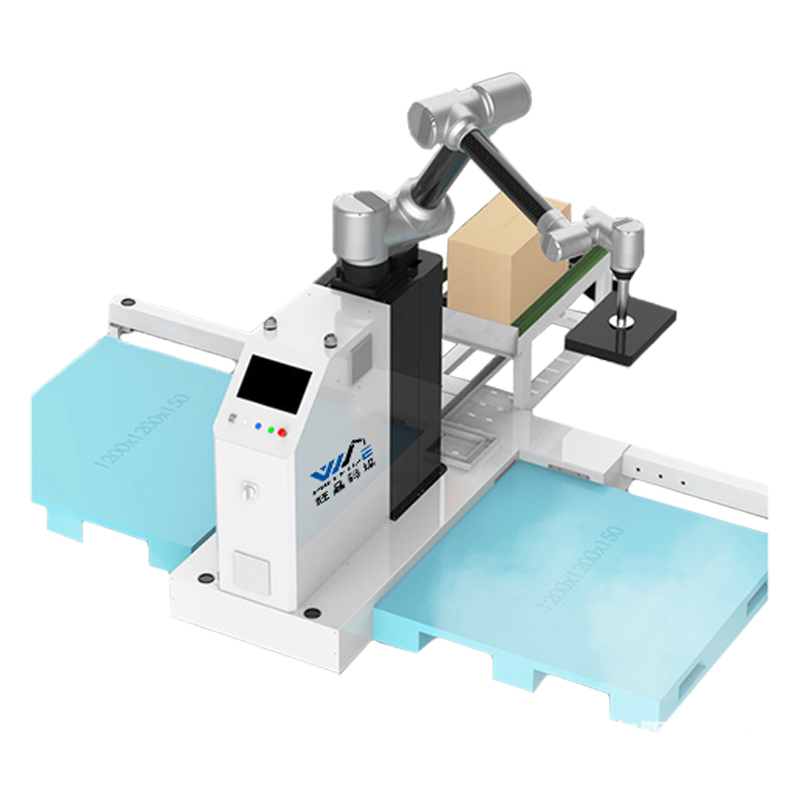
移动式、便携式、固定式机器人码垛机
码垛机器人是一种能够模拟人类手臂进行物品抓取、搬运并按预定方式堆叠的自动化设备。其工作原理可以概括为 感知-决策-执行 三个环节: 感知:感知周围环境及待处理物料的信息。
市场前瞻 2024-11-25
堆垛机:自动化仓储系统中的全面解决方案
在现代物流仓储系统中,随着自动化技术的不断发展,堆垛机成为了自动化仓储系统中的重要组成部分。堆垛机作为一种可以自动进行货物存储和取货的设备,极大地提高了仓储效率,减少了人力成本,实现了物流仓储的智能化管理,被广泛应用于工业生产和物流行业。本文将从堆垛机的工作原理、应用场景以及未来发展趋势等方面进行介绍,以期给读者带来更全面的了解。
市场前瞻 2024-11-23

工业自动化码垛机器人
码垛机器人是一种能够模拟人类手臂进行物品抓取、搬运并按预定方式堆叠的自动化设备。其工作原理可以概括为“感知-决策-执行”三个环节:
感知:通过传感器(如视觉传感器、力传感器等)感知周围环境及待处理物料的信息。
决策:依据预设程序或人工智能算法进行数据处理与分析,制定最优操作策略。
执行:驱动机械臂执行抓取、移动、旋转、放置等一系列动作,完成码垛任务。
市场前瞻 2024-11-21

日用品码垛机器人搬运原理
控制系统:作为码垛机器人的“大脑”,控制系统负责接收指令、处理信息并发出控制信号。它通常由编程软件、传感器、控制器等组成,能够精确控制机器人的运动轨迹、抓取和码放等功能。
机械系统:机械系统是码垛机器人的“四肢”,由机械臂、底座、抓取机构等部件组成。在控制系统的指挥下,机械系统能够按照预定的轨迹进行运动,完成货物的抓取、搬运和码放等操作。
市场前瞻 2024-11-18

工业全自动日用品搬运码垛机器人
定义:工业全自动日用品搬运码垛机器人是一种能够模拟人类手臂进行物品抓取、搬运并按预定方式堆叠的自动化设备。
工作原理:这类机器人的工作原理可以概括为“感知-决策-执行”三个环节。首先,通过传感器(如视觉传感器、力传感器等)感知周围环境及待处理物料的信息;其次,依据预设程序或人工智能算法进行数据处理与分析,制定最优操作策略;最后,驱动机械臂执行抓取、移动、旋转、放置等一系列动作,完成码垛任务。
市场前瞻 2024-11-11

工业生产线码垛机器人
感知:通过传感器(如视觉传感器、力传感器等)感知周围环境及待处理物料的信息。
决策:依据预设程序或人工智能算法进行数据处理与分析,制定最优操作策略。
执行:驱动机械臂执行抓取、移动、旋转、放置等一系列动作,完成码垛任务。
市场前瞻 2024-11-08

码垛机的日常保养
码垛机的日常保养主要包括以下几个方面:1.保持清洁:定期清洁码垛机的各个部件,如传动装置、传感器、夹爪或吸盘等,使用柔软的布或刷子,避免使用腐蚀性清洁剂,以免损坏部件。润滑维护:根据制造商的建议,定期对机械部件进行适当的润滑,注意使用正确的润滑剂并遵循使用说明传感器校准:如果码垛机使用传感器进行定位和识别,应定期检査和校准传感器,以确保基准确性和可靠性。
市场前瞻 2024-11-06

工业自动化码垛搬运机器人
工业自动化码垛搬运机器人是一种能够模拟人类手臂进行物品抓取、搬运并按预定方式堆叠的自动化设备。它集成了机械、电子、计算机、传感器、人工智能等多学科技术,通过精密的控制系统实现复杂的三维空间作业。其基本原理可概括为“感知-决策-执行”三个环节:首先,通过传感器(如视觉传感器、力传感器等)感知周围环境及待处理物料的信息;其次,依据预设程序或人工智能算法进行数据处理与分析,制定最优操作策略;最后,驱动机械臂执行抓取、移动、旋转、放置等一系列动作,完成码垛任务。
市场前瞻 2024-11-04
