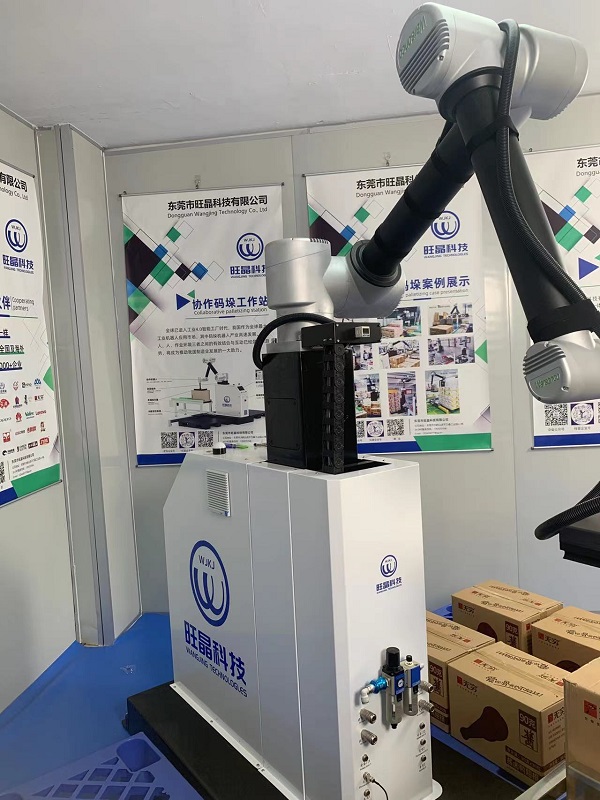
码垛机的工作原理
传感器探测:码垛机先通过传感器对物品进行探测,确定其位置和大小。物品抓取:码垛机根据传感器的反馈,控制机械臂来抓取物品,。物品定位 :机械臂将物品定位在相应的位置上,然后放置到指定的目标位置。精准堆码:通过行程传感器来检测物品堆叠的高度,并根据高度控制机械臂来定位堆码的位置,以达到最佳的垛型效果。数据处理:在整个堆码的过程中,码垛机会采集数据并实时处理,以确保整个堆码过程的准确性和效率,此外,码垛机还依赖于视觉检测技术,通过相机等设备获取待码垛产品的位置、大小、形状等信息,并通过视觉算法处理这些信息,实现高精度的码操作。码垛机能够将产品放到指定的位置上,实现自动化的码垛操作,根据产品的规格、
版权声明:此文版权归原作者所有,若有来源错误或者侵犯您的合法权益,您可通过邮箱与我们取得联系,我们将及时进行处理。