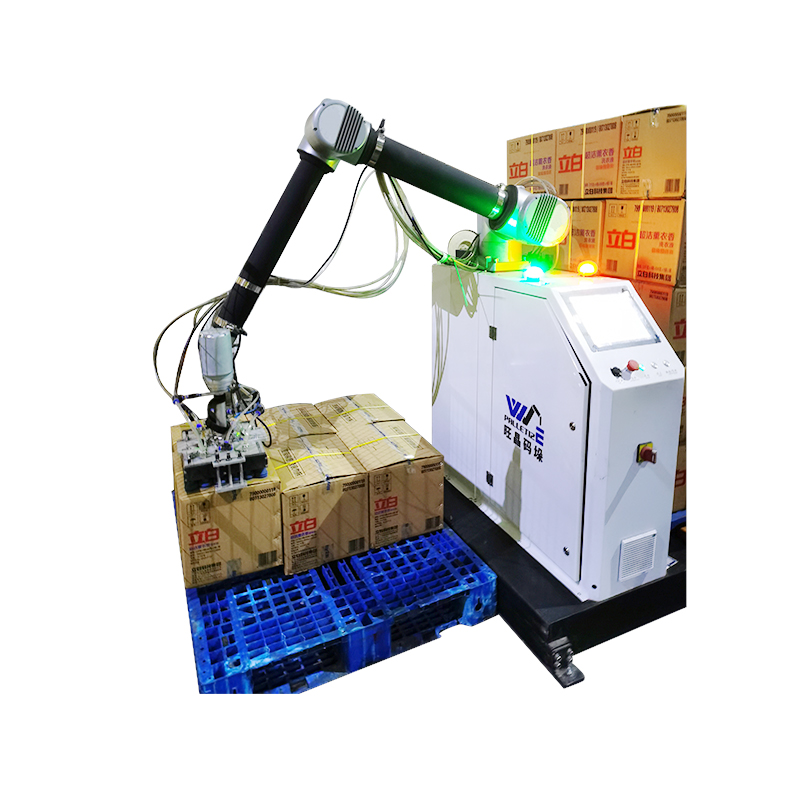
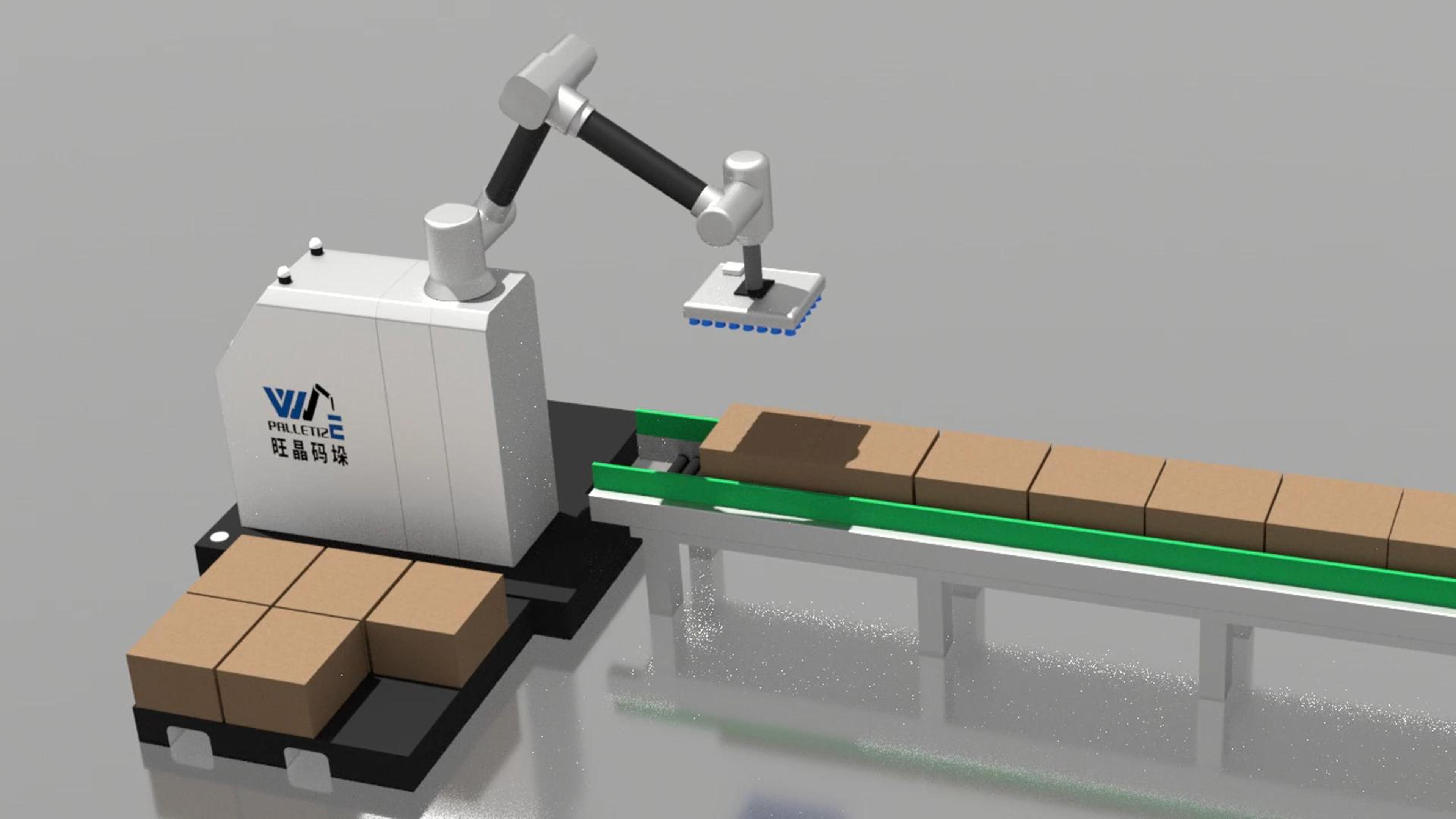
这款3D拆垛机器人实现混合拆垛自动化,可以实现多种工艺
近年来,中国出现了各种各样的仓储自动化机器和设备。如何利用自动化机器提高仓储运营的效率,减少人工,似乎是现阶段仓储行业关心的问题。从工艺规划到软硬件设计,都要充分考虑施工现场的具体情况。本发明能够提高复杂场景下的极限,实现高效作业。

首先,因为进给栈类型是手动动态编码的,所以进给栈类型完全是任意的。不适合应用模板比较来识别定位模式。
需要更软的定位模式来准确识别精确定位。其次,每一堆纸箱都有各种类型,不同的尺寸和比例,总数不确定。
这就使得每个纸箱的空间坐标不一致,需要精确定位每个纸箱的空间坐标。
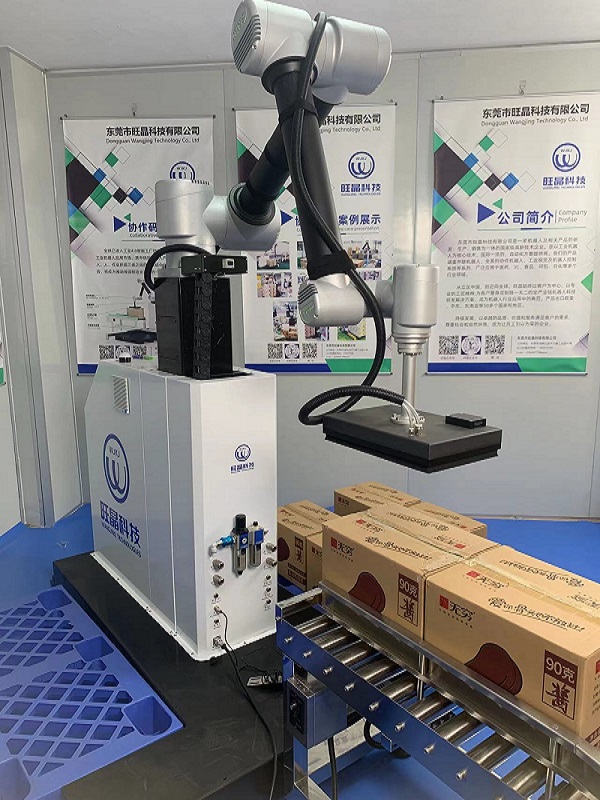
随后,托盘尺寸为1200*1000mm,堆垛高度不确定度达到1800mm。传感器的精度水平与安装高度成反比,与产品尺寸成正比。
堆码又高又大,单个纸箱规格小,对传感器提出了更高的要求。不仅仅是精度,还有速度。
埃尔森的技术人员必须找到一个简单而复杂的答案来智能识别——张图像。
根据堆垛机机器人的图像智能识别技术,AT-S1000-01A手机定位系统无需事先键入纸箱型号、规格等相关信息,即可识别并计算出每个纸箱的方向和空间坐标,引导机器人精准攀爬。AT-S1000-01A手机定位系统可以批量计算每个纸箱的实际尺寸数据信息,判断型号规格,记录总件数,与WMS系统无缝对接,根据软件数据即时调整,进一步节省人力资源,提高工作效率。
堆垛机机器人具有视角广、精度高的特点,可以轻松hold住1.8米高堆垛机的精确脱贫定位。随着各种自动化物流机器和技术的高效普及,机器更换成本将大幅下降。
从而提高仓储物流的效率,无疑是公司赢得未来行业竞争的关键。
版权声明:此文版权归原作者所有,若有来源错误或者侵犯您的合法权益,您可通过邮箱与我们取得联系,我们将及时进行处理。