我们想知道什么是码垛机器人?码垛机器人的原理是什么??
协作码垛机器人是一种用于自动执行作业的机械装置。在使用中,它能接受人的指挥,正确运行预先安排好的程序。它可以按照人工智能技术制定的原则和准则行动,将已经装入集装箱的物品按照一定的排列代码放在货盘和货盘(木质和塑料)上,从而自动堆码,多层堆码,然后推出,便于叉车运输到仓库库存它的目的是辅助或替代人类的重复性工作,如生产、施工等。
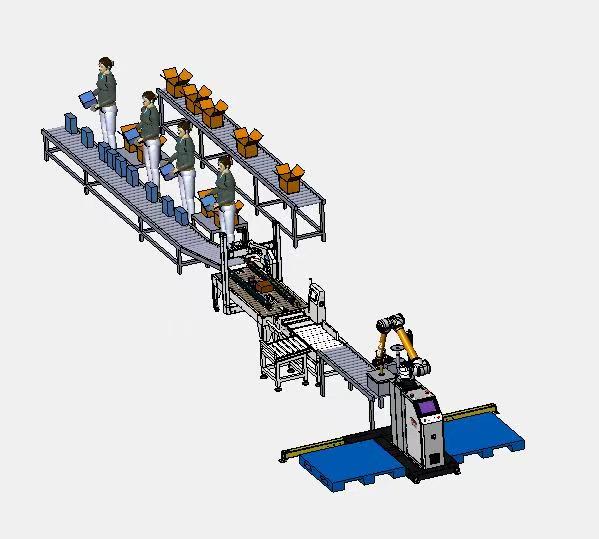
协同码垛机器人可以集成到任何生产线上,为生产现场提供智能化、机器人化、网络化,实现啤酒、饮料、食品行业各种作业的码垛物流,广泛应用于纸箱、塑料盒、瓶、袋、桶、膜包产品、灌装产品等。配套三合一灌装线等。堆各种瓶瓶罐罐。堆垛机的自动操作可分为自动进箱、转箱、分拣、码垛、堆垛、装车、卸车、卸车等步骤。
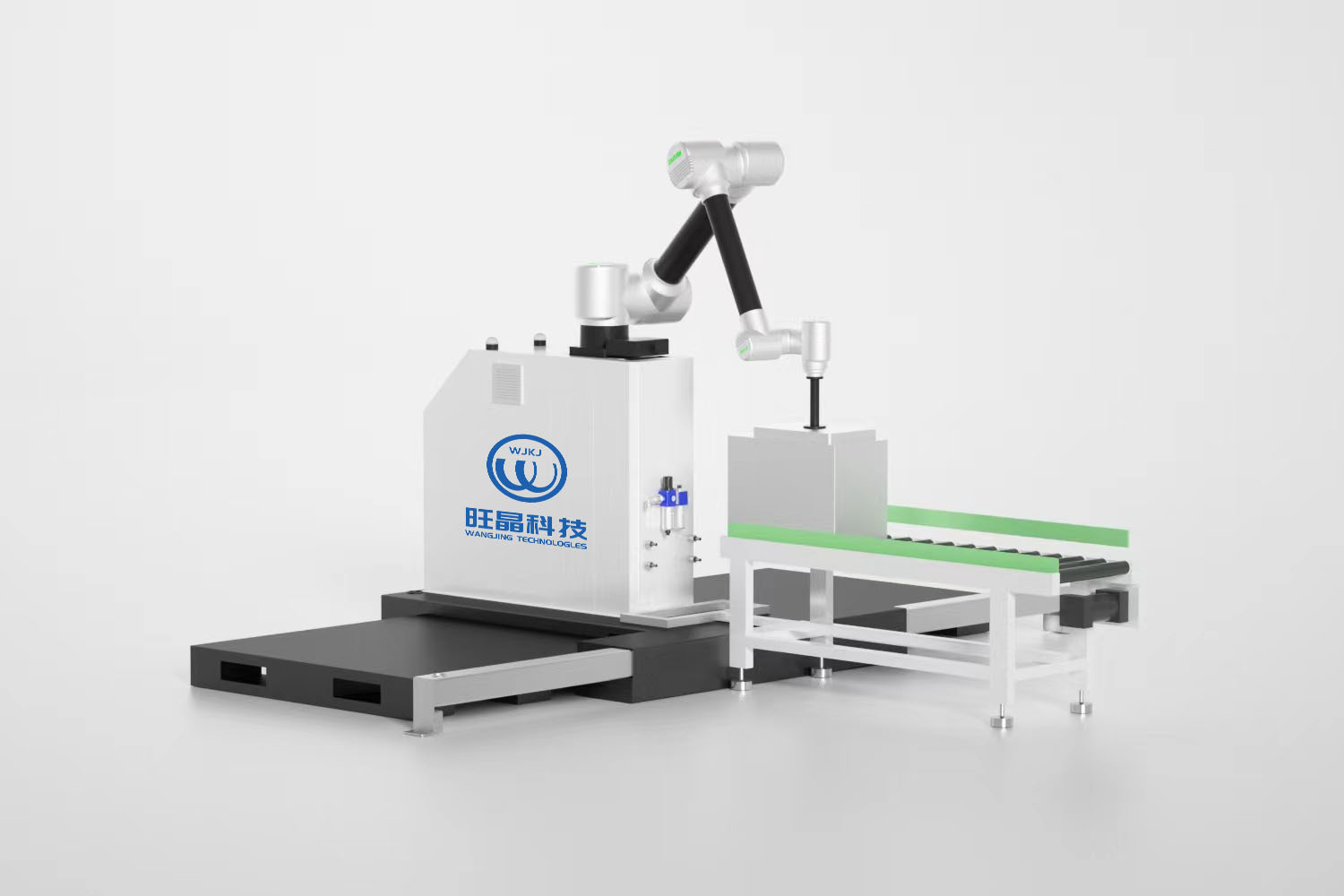
协作码垛机器人抓手原理
协作式码垛机器人多进行抓放作业,即机器人从传送带上抓取物料,沿移动路径放置在托盘上的指定位置。因此,根据机器人完成码垛时与传送带和托盘的位置关系,并考虑移动过程中栅栏门的quot形运动轨迹,选择。值得注意的是,机器人末端执行器在托盘上不同位置完成纸箱堆垛时,轨迹都是quot gates quot,轨迹端点的坐标只是因为纸箱在托盘上的位置不同而不同。
所谓码垛,就是按照集成化、单元化的思想,将物料按照一定的方式进行堆码,使单元化的码垛实现存储、搬运、装卸、运输等物流活动。与传统的人工码垛和龙门码垛机相比,码垛机器人具有生产效率高、占用空间小、灵活性大、劳动强度低等优点,逐渐应用于各个领域。
常用的码垛机器人手抓
爪式机械抓具:主要用于高速码袋;
夹板式机械手爪:主要适用于箱子堆垛;
真空机械手爪:主要适用于可吸收的堆叠物体;
混合机械手爪:主要适用于可吸收的堆叠物体;
抓取机械手爪:适用于多个工位的协同抓取和放置。
使用码垛机器人时,考虑机器人如何抓取产品非常重要。真空手爪是机械臂(EOAT)最常见的末端工具。相对来说,它们价格便宜,操作简单,能有效装载大部分载荷。然而,在一些特定的应用中,真空夹持器也会遇到一些问题,如基底表面多孔,液体内容物的柔性包装,或包装表面不平整。

码垛机器人分类
1、根据结构。
根据机械结构的不同,码垛机器人包括以下三种形式:双耳式、旋转关节式和龙门起重机式。
Tical码垛机器人:主要由立柱、X臂、Y臂和手爪四部分组成,可以实现四个自由度(包括三个移动关节和一个旋转关节)的物料码垛。这种堆垛机结构简单,刚性强,运载重量大,适合堆垛较重的物料。
关节式机器人:堆垛机围绕机身旋转,包括四个旋转关节:腰关节、肩关节、肘关节和腕关节。这种堆垛机是通过示教编程的,即操作者手持示教盒,控制机器人按照指定的动作移动,因此移动过程存储在存储器中,以后自动运行时可以重现。这种机器人体积小,运动范围大。可以同时堆码一个或几个托盘,可以在各种产品生产线上灵活工作。
龙门起重机:机械臂安装在龙门起重机上,称为龙门码垛机器人。这种码垛机器人工作范围广,可以抓取较重的物料。
2.根据需要堆叠。
单层pa
单层码垛机器人比较基础,主要靠传送带输送物料。当它到达转向机构时,可以按照指定的方向进行调整。准备好后,就可以进入层输送机构了。只要按照设定的排列顺序将产品紧密排列在这个地方,排列好的产品就会被输送辊转移到下一个工位,这样堆垛机器人的堆垛作业就完成了。
多层码垛机器人
一层对应一定有多层,肯定比单层码垛机器人复杂。我们可以看到多层码垛机器人的托盘是在传送带下面还是可以左右移动。机器堆垛时,物料会整齐的排列在托盘上,然后托盘会设置在左极限位置。当传送带输送的物料被挡板挡住时,它们排成一排。然后托盘向右移动,物料会像上面的步骤一样重新排队。以此类推,每增加一层物料,码垛机器人的升降台高度就会下降一层,直到物料堆积到一定高度。
布局堆垛机器人
这种码垛机器人把物料排成一排,然后运输。推车机将把运输的材料放在集料台上。然后向左移动,从下往上推,把三层材料叠在一起。在这个过程中,会有一个坡道装置来保证过程的顺利完成,而集料平台的特殊性也有助于码垛机器人完成码垛。这些只是一些普通的码垛机器人。
协作码垛机器人主要优点
码垛机器人的码垛能力远高于传统码垛机和手动码垛机。
结构简单,故障率低,易于维护和维修;
主件和备件少,维护成本低;
功耗低,约为机械堆垛机的五分之一。
码垛机械手可设置在狭小的空间内,效率高,应用灵活;
所有操作都可以通过控制柜屏幕上的上手触摸来完成,操作非常简单。
码垛机械手的应用非常灵活。一个机械臂可以同时处理多达6条生产线上的不同产品。产品更新时,只需输入新数据,重新计算后即可操作。没有硬件和设备需要修改设置。